



Elmeq participa en el anuario Spain Defence & Security Industry 2026
Elmeq, proveedor de mecatrónica para defensa, participa en el anuario Spain Defence & Security Industry 2026 con soluciones avanzadas para el sector.
«La empresa Magazino tiene como objetivo crear el primer almacén de auto-pensamiento y autocontrol del mundo con los equipos de Faulhaber»
El nuevo robot logístico que han desarrollado, se llama TORU y actualmente se está probando a sí mismo en pruebas prácticas con los principales proveedores de servicios de paquetería. Estos utilizan el sistema inteligente de auto-conducción sobre todo para seleccionar cajas de zapatos durante la preparación de pedidos.
Concepcionalmente, TORU es un robot denominado de percepción controlada. Mediante el uso de cámaras, procesamiento de imágenes, sensores e inteligencia artificial, es capaz de percibir e interpretar correctamente su entorno y utilizarlo como base para tomar decisiones.
¿Tomar decisiones? Cuando TORU recibe un pedido para elegir un determinado par de zapatos, primero se le da la dirección del almacén más un código de barras. Por lo tanto, el robot sabe dónde se debe ubicar el contenedor de destino y navega hasta la dirección. Luego gira 90 grados hacia el estante y una pinza se mueve al contenedor especificado y ahora TORU comienza a tomar decisiones por sí mismo.
Usando imágenes de cámara tridimensionales, el robot primero produce una imagen de la situación actual. «¿Hay una caja de zapatos en el estante? ¿Está presente el código de barras correcto? ¿Soy capaz de agarrar la caja de cartón: tal vez se movió un par de centímetros hacia un lado y se puede atascar al sacarla?»
Con estas preguntas, el portavoz de Magazino, Florin Wahl, describe las tareas principales del análisis visual. Son las respuestas las que hacen que el sistema de Munich sea tan único. Si una orden de picking está vinculada a una caja de cartón que un empleado colocó en el estante algo torcida, el robot intenta adaptar su proceso de agarre a las circunstancias. En estos casos, TORU determina que el agarre aún no es posible, el trabajo se devuelve al sistema, y un empleado del almacén tendría que realizar la selección del pedido a mano.
Y, si no se detectan problemas, los encargados de manejar las cajas de zapatos son los sistemas de FAULHABER. Aquí, los controladores de movimiento, los servomotores brushless de la serie BX4 y los reductores planetarios forman un sistema de accionamiento que se extiende y retrae una lengüeta de metal. La tarea en este caso es cerrar la brecha entre el vehículo y la parte inferior de la plataforma. De este modo, la trayectoria se nivela, lo que permite extraer las cajas sobre la superficie plana con presión negativa.
Para el posicionamiento de la pinza de succión a lo largo de un bastidor dentado, Magazino utiliza unidades de tipo BX4 de FAULHABER. Con una potencia de 62 vatios, los servomotores de CC sin escobillas entregan pares nominales de hasta 72 mNm en funcionamiento continuo.
Lo que realmente es interesante para Magazino son los pares máximos de hasta 96 mNm. La capacidad de sobrecarga es decisiva para superar los pares de ruptura al manejar las cajas de zapatos. «Necesitamos motores con alta densidad de potencia», explica Raphael Vering del desarrollo de ingeniería en Magazino.
Debido a que los pares de torsión máximos sólo se requieren en una ventana de tiempo muy estrecha, no hay riesgo de que los motores se calienten demasiado.
El excelente comportamiento ante una sobrecarga en, el utiliza motores de tan sólo 32 milímetros de diámetro, ofrece a los pioneros de la logística de Múnich una serie de ventajas.
El diseño proporciona la base para poder usar motores más pequeños a través del manejo fiable de los pares de arranque. «La masa de la pinza debe ser lo más baja posible, ya que debe moverse a lo largo del eje vertical con TORU», explica Raphael Vering.
Cuanto más pesada sea la unidad de agarre, mayor será la potencia requerida del motor del eje vertical. Luego está la cuestión del centro de masa cuando TORU necesita agarrar una caja de zapatos ubicada en el nivel superior de un bastidor de dos metros.
Sin lugar a dudas: el centro de masa se puede desplazar hacia abajo fácilmente utilizando una placa base más gruesa. Esto, sin embargo, hace que la unidad de desplazamiento sea más pesada. Como resultado, se necesita un motor de accionamiento más fuerte. Esto, a su vez, requiere más energía de la batería, lo que reduce el rango.
También es necesario un diseño liviano porque TORU debe usarse no solo en suelos de cemento, sino también en superficies más delicadas. «Aquí, en particular, las cargas superficiales son muy limitadas. Sin embargo, queremos que TORU sea lo más versátil posible», señala Florin Wahl.
Con la solución FAULHABER, Magazino puede moverse muy abajo y subir nuevamente. «Esto es extremadamente importante cuando consideramos la capacidad de un almacén con respecto al área de la planta. Cada espacio adicional en la estantería vale oro», resume Florin Wahl.La idea detrás de TORU reside en la implementación de un sofisticado sistema de automatización, robótica, visión y conducción autónoma.
«El apoyo a la comunicación CANopen fue decisivo para nosotros», refleja Raphael Vering. Debido a que la empresa de Múnich también pudo usar un sistema de control de movimiento completo de FAULHABER que se ajustaba perfectamente, el departamento de desarrollo tenía más libertad para seguir optimizando la nueva solución logística.
«No necesitamos invertir en ningún momento en nuestros propios controladores o en la integración de los encoders», enfatiza Vering. Con los servomotores de CC, los controladores de movimiento FAULHABER de la generación V2.5 forman sistemas de posicionamiento altamente dinámicos.
Para el control de retroalimentación, Magazino usa sensores Hall analógicos, lo que elimina la necesidad de un encoder separado para la retroalimentación. El control de corriente integrado de los controladores de movimiento limita el par y, por lo tanto, protege la electrónica y el motor contra sobrecargas.
Con TORU, Magazino ha logrado desarrollar una solución de manejo de materiales que puede mejorar de manera simple y fiable la eficiencia en logística.TORU está equipado con un estante móvil en el que se insertan las cajas retiradas. Las sistemas de centrado con unidades FAULHABER ayudan a colocar las cajas de manera que ahorran espacio.
El diseño de la pinza de succión con unidades FAULHABER, ha permitido una excelente fiabilidad que ha permitido reducir el peso de la columna principal del motor, facilitando el posterior diseño del resto del Robot,. Además gracias a la comunicación CANopen, la integración ha sido sencilla.
Elmeq, proveedor de mecatrónica para defensa, participa en el anuario Spain Defence & Security Industry 2026 con soluciones avanzadas para el sector.

Elmeq participa en la SSSIF 2026 en Málaga presentando las últimas soluciones de movimiento y control de AMC y FAULHABER para aplicaciones aeroespaciales y de defensa. Descubre en el stand C04 micromotores, reductores y servodrives diseñados para entornos exigentes.
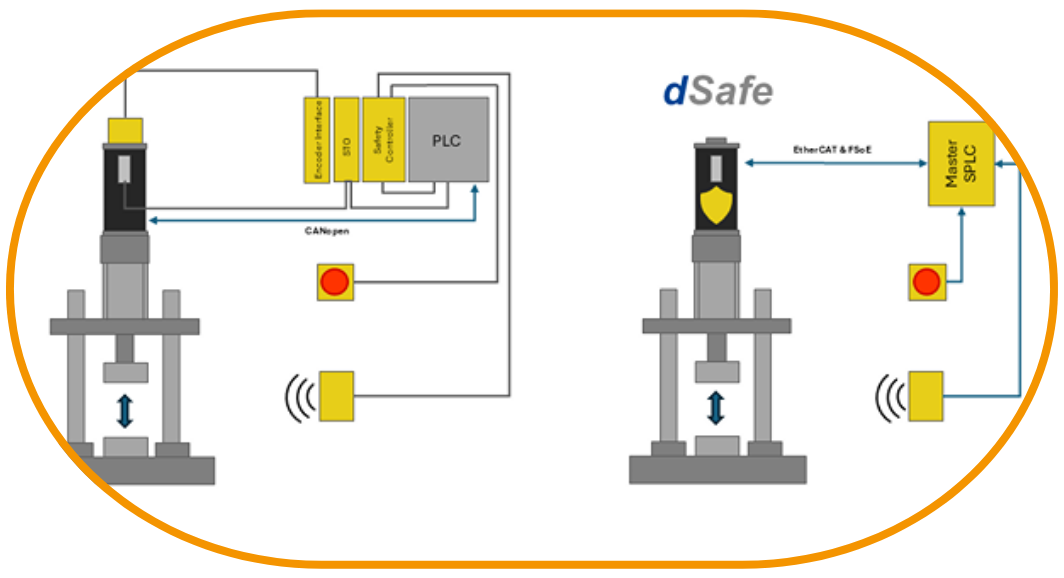
En Elmeq incorporamos a nuestra oferta de soluciones dSafe, la última innovación de Dunkermotoren. Esta