
Elmeq participa en el anuario Spain Defence & Security Industry 2026
Elmeq, proveedor de mecatrónica para defensa, participa en el anuario Spain Defence & Security Industry 2026 con soluciones avanzadas para el sector.

La democratización de la robótica está llevando al sector a explorar fórmulas para equipar sus soluciones de automatización con herramientas versátiles que igualen la potencia y densidad de la tecnología neumática con una mayor eficiencia y rentabilidad. Desde hace más de tres décadas, el equipo de ingenieros de Elmeq colabora con el fabricante alemán de accionadores eléctricos Faulhaber para dar respuesta a las necesidades de automatización robótica de la industria española. En nuestro centro de I+D trabajamos por brindarte un equilibrio entre diseño compacto, máxima potencia, eficiencia energética, seguridad y versatilidad.
En el ecosistema de Faulhaber, los motores planos BXT, con reductores, encoders y controladores de velocidad precisos, se erigen en firmes aliados para aplicaciones donde el espacio es reducido y la simplicidad es un valor añadido. Otros componentes de alta calidad son los servomotores brushless DC de Faulhaber, la solución de movimiento más compacta de la industria, con electrónica integrada, que destaca por su facilidad de uso con control de corriente.
A continuación detallamos algunos ejemplos de cómo nuestra alianza con Faulhaber puede ayudarte a acelerar tus proyectos de automatización en sectores como laboratorio y farmacia, electrónica o metalurgia.
El éxito de cualquier proceso automatizado que requiera recoger y colocar objetos o piezas depende en gran medida de contar con sistemas de agarre precisos, fiables y versátiles en cuanto a velocidad y fuerza de agarre. De esta manera la aplicación de picking puede ajustarse a los distintos objetos y puntos de agarre, así como a tiempos de ciclo exigentes y una producción ininterrumpida. Las pinzas eléctricas son una de las opciones más potentes y rentables al no requerir la infraestructura adicional de compresores, tuberías y sistemas de control propios que sí precisan las pinzas neumáticas.

En las pinzas robóticas de tipo eléctrico, los motores sin escobillas de Faulhaber impulsan el movimiento rotativo de un ventilador para provocar un caudal volumétrico y así generar vacío eléctrico. Los sistemas de accionamiento de la firma alemana son compatibles con distintas interfaces estándar de la industria, como RS232, CAN y EtherCAT).
La tecnología de Faulhaber también se encuentra en las pequeñas pinzas EGP 40 de SHUNK para proporcionar a los sistemas de agarre un rendimiento rápido, potente y de alta densidad equiparable al de las garras neumáticas. Para alcanzar los resultados del aire comprimido pero con una eficiencia mayor, los servomotores brushless de la serie BX4 de Faulhaber de 4 pines ofrecen el máximo par y potencia respecto a su masa. Desde que se pone en marcha o cuando funciona a pocas revoluciones, pone todo el par a disposición de la garra. Además, funciona sin engranajes, con lo que su par de torsión no depende de la posición. Eso beneficia a las garras pequeñas cuyos dedos hacen recorridos muy cortos en tareas como en el montaje de diminutos circuitos electrónicos o en la manipulación de muestras de laboratorio.
Otro aspecto definitivo en la rentabilidad de un robot es su flexibilidad para cambiar de tarea o ajustarse a nuevas referencias de producto minimizando los tiempos de inactividad por el cambio de herramienta. Ahí es donde entran en juego los cambiadores, que permiten sustituir con facilidad, rapidez y seguridad la herramienta de final de brazo de un robot: de una garra a una cámara de visión artificial, por ejemplo. Si bien los cambiadores neumáticos habían predominado por su robustez, los últimos avances en motores están suponiendo una apuesta cada vez mayor por los accionamientos eléctricos.
Estos avances se reflejan en los cambiadores de la serie TKX de IPR – Intelligent Peripherals for Robots, que usan micro motores sin escobillas de la gama Faulhaber BXT para abrir, cerrar y retener los anillos de bloqueo del cambiador. Estos accesorios pueden manipular piezas de 3 a 300 kilogramos, alcanzar números de ciclo de siete dígitos sin necesidad de mantenimiento y soportar temperaturas de hasta 80 grados. El accionamiento de Faulhaber proporciona una relación óptima entre par, peso y volumen.
La precisión en la soldadura por láser es el gran desafío para automatizar una tarea tan exigente y sensible como esta. Tradicionalmente una cámara determinaba el recorrido de la unión y se la comunicaba al control del robot, pero eso generaba un breve retraso entre la imagen captada por la cámara y el cabezal láser. Además, este sistema era vulnerable a cualquier cambio en la iluminación o los reflejos. Actualmente, se utiliza como guía un hilo de alimentación para un escaneado mecánico. Al empujarlo contra el borde de la chapa superpuesta, se obtiene un parámetro preciso y compensable en tiempo real para el control del cabezal láser.
Es aquí donde entra en juego el proyecto de Faulhaber con la empresa Scansonic. El motor sinusoidal de Faulhaber con el control de movimiento piggy-back integrado permite una detección precisa de la corriente del motor. En paralelo, los sensores Hall analógicos detectan la posición. Estos dos parámetros, corriente y posición, se traducen en una señal de control extremadamente fiable a través de la interfaz RS 232 que llega al cabezal láser para una unión por soldadora precisa.
Si quieres que te ayudemos a llevar a optimizar los sistemas de movimiento de tu aplicación robótica, ponte en contacto con nuestro equipo de ingenieros.
Elmeq, proveedor de mecatrónica para defensa, participa en el anuario Spain Defence & Security Industry 2026 con soluciones avanzadas para el sector.

Elmeq participa en la SSSIF 2026 en Málaga presentando las últimas soluciones de movimiento y control de AMC y FAULHABER para aplicaciones aeroespaciales y de defensa. Descubre en el stand C04 micromotores, reductores y servodrives diseñados para entornos exigentes.
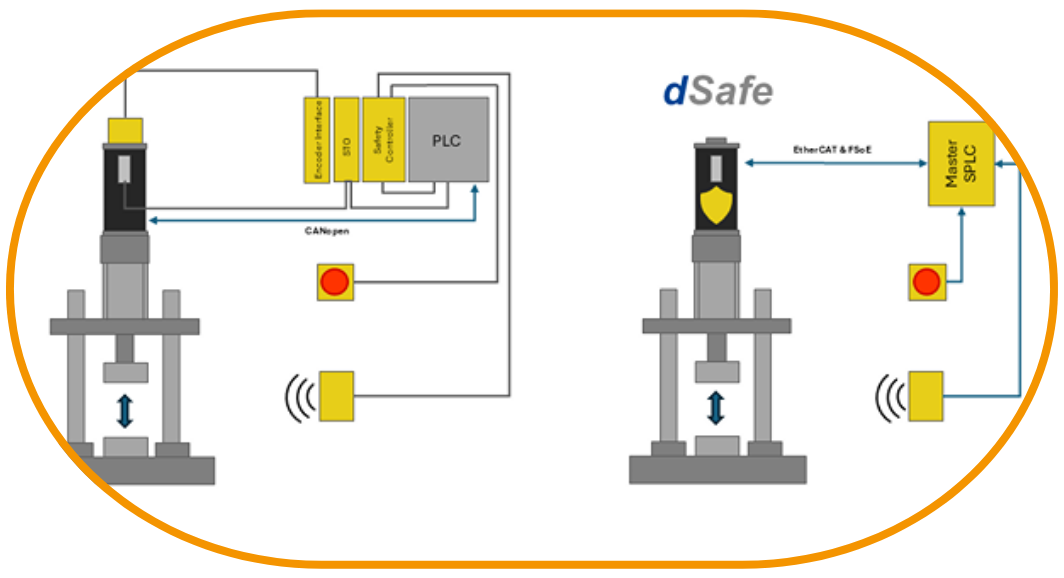
En Elmeq incorporamos a nuestra oferta de soluciones dSafe, la última innovación de Dunkermotoren. Esta